Breadcrumb
强化学习中的基本概念以及马尔可夫决策
本系列为强化学习的学习笔记,本章讲解对强化学习的个人理解以及名词解释,如state,action,policy,reward,return,以及MDP。
强化学习
机器学习(Machine Learning, ML)分为监督学习,非监督学习,以及半监督学习,其中非监督学习里又包含有自监督学习,除去这些以外,强化学习(Reinforcement Learning, RL)也作为机器学习的一种,但是其重点在于学习策略而非结果。
举个种菜的例子,一般的机器学习都是正向地预测目标,比如这里水,CO2,营养液,风扇速率等各种变量构成了机器学习中的参数,我们需要训练模型,使其通过这些参数去预测出一个最终可能的产量或者重量等结果。但是,对于强化学习来说,它的目标在于如何去找到一个最佳的策略(什么时候加水?加多少水?风扇什么时候开?),使其产量达到最高,因此我们可以说强化学习不是预测结果,而是要去指导每一个阶段的动作。
目前RL应用于很多领域,包括但不限于:
- 游戏
- 自动驾驶
- 股票金融
- 能源管控
术语/概念介绍
核心概念
强化学习中有几个核心概念,分别是智能体(agent),状态(state),行为(action),策略(policy),奖励(reward)。比较书面的解释为:
- 智能体:是指能够感知环境并采取行动以实现特定目标的代理体。它通过感知环境中的变化(如通过传感器或数据输入),根据自身学习到的知识和算法进行判断和决策,进而执行动作以影响环境或达到预定的目标。
- 状态:描述了智能体在当前环境的一个状态,环境基本上代表了这个情境里里所有的参数。
- 行为:智能体可以采取的行为。
- 策略:告诉智能体在哪个阶段采取什么样的行为。
- 奖励:在智能体采取某一个行为之后,会获得奖励,也可以叫做环境给予的反馈。
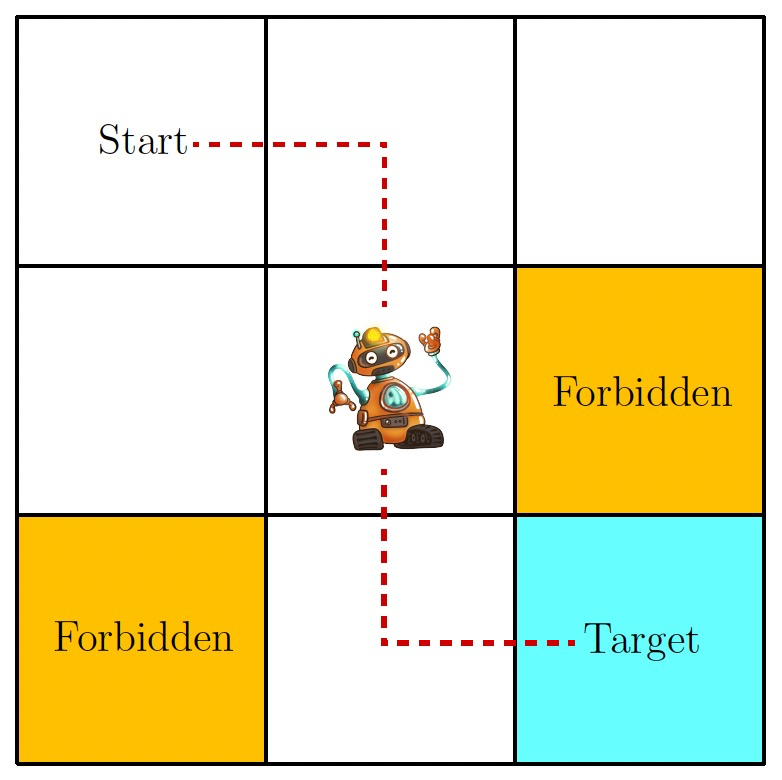
拿最经典的网格游戏为例,如图,机器人会在其中一个网格,最终目标是找到一条最优路径去到Target space,其中有障碍物Forbidden。那么这里的最优路径也就是我们要寻找的策略,机器人便是智能体,它每一个时刻所处的格子为他的状态,然后在不同的状态下它可以选择不同的上下左右四种行为,这样就描述了一个完整的任务。
但是强化学习的过程学习的是什么东西呢?我们都知道在机器学习中,存在一个loss函数,描述了预测值到真实值之间的距离,我们的目标就是使其减少或者是尽可能收敛。但在强化学习中,采用了另一种方式来指导模型自我迭代,那就是奖励,智能体每做一次行为之后都会得到奖励,如果这个奖励是负数的话也可以被叫做惩罚,强化学习的目标就是最大化所获得的奖励。
除此以外,还有返回(Return)和马尔可夫决策过程(Markov decision processes, MDP),返回指的是一条路径上所获得的奖励之和,马尔可夫决策过程单开一章详细解释。
马尔可夫决策过程
以下统一用MDP表示
MDP是一种正式的方式去表示上述描述的所有内容,是离散时间随机控制过程,它提供了一个数学框架:
- 集合(Sets)
- 状态空间(State space),写作\(\mathcal{S}\)。
- 行为空间(Action space),写作\(\mathcal{A}(s)\),\(s \in \mathcal{S}\),因为行为与当前状态相关。
- 奖励集(Reward set),写作\(\mathcal{R}(s,a)\), 奖励与当前状态和所选行为相关。
- 模型(Model)
- 状态转移概率(State transmission probality):从一个状态s经过某个行为a转移到另一个状态s’的概率\( p(s^’|s,a)\) ,其中\( \sum_{s^’ \in \mathcal{S}}p(s^’|s,a) = 1\)。
- 奖励概率(Reward probability):在状态s时,当我们选择行为a,所能获得奖励r的概率为\(p(r|s,a)\),对于每一个状态和动作都有\(\sum_{r \in \mathcal{R}(s,a)}p(r|s,a)=1\)
- 策略(Policy):在状态s中选择某个行为a的概率为\(\pi (a|s)\), 对于每一个状态都有\(\sum_{a \in \mathcal{A}(s)} \pi (a|s)=1\)
- 马尔可夫特性(Markov property):其实就是无记忆性,任何时刻可能采取的行为与之前的所有行为都无关,只与当下有关,记住就行。具体的数学表达式为: $$ p(s_{t+1}|s_t,a_t,s_{t-1},a_{t-1},…,s_0,a_0) = p(s_{t+1}|s_t,a_t) $$ $$ p(r_{t+1}|s_t,a_t,s_{t-1},a_{t-1},…,s_0,a_0) = p(r_{t+1}|s_t,a_t) $$
- (Published)
- (Modified)
Some information might changes over time, we keep redaction up to date.